
737MCP mit neuen „weißen“ Anzeigen und Filter
| 7-Segmentanzeigen in weiß, mit und 1 bzw. 2fach Filter | |
  |
  |

LCD vs. LCD – oder warum ist mein LCD so langsam
Nachdem jetzt doch einige gefragt haben ob ich nicht noch mehr Telemetrydaten in das rcc – (real cockpit connecktor) einbauen kann, habe ich mich entschlossen den Wünschen nachzukommen da ich ja sowieso noch einige Ideen im Hinterkopf habe.
Eine davon ist das Anzeigen der Telemetrydaten auf einem 20×4 LCD (HD44780) .
Da ich schon einige andere Arduinoprojekte mit LCD gemacht habe war die Umsetzung recht schnell erledigt.
Zu diesem Zweck habe ich mir noch ein I2C-controler besorgt. Schnell und unkompliziert, denn damit ist das LCD mit 4 Kabeln an den Arduino angeschlossen.
Jaaaa… und damit fingen die Probleme dann auch an.
Da die Daten relativ schnell kommen und nicht statisch sind, lassen sich die Werte, trotz Gegenprüfung auf alte und neue Werte im Code, schlecht lesen.
Also die grosse Glaskugel befragt und dort bin ich auf verschiedene Anschlussmöglichkeiten mit doch sehr verschiedenen Geschwindigkeiten gestoßen.
Stichwort NewLiquidCrystal
Unter anderem finden wir im oben genannen Link folgende Tabelle.
Interface ByteXfer 16x2FPS Ftime
----------------------------------------------
4BIT 338us 86.92 11.51ms (orignal Arduino IDE Liquid Crystal)
4BIT 98us 298.58 3.35ms
SR2W 76us 388.62 2.57ms
SR_2W 72us 406.90 2.46ms
SR_3W 61us 480.03 2.08ms
SR3W 102us 287.92 3.47ms
I2C 957us 30.74 32.25ms
I2C (GPIO) 839us 35.07 28.51ms
SR1W_HC 94us 311.41 3.21ms
SR1W_SC 116us 252.83 3.96ms
Diese Werte musste ich doch sofort überprüfen da es doch schon ein gravierender Unterschied geben soll. Zu diesem Zweck hab ich mir also ein noch rumliegendes
Shiftregister Breakout mit 74HC595 mit einem LCD 16×2 und ein LCD 16×2 mit I2C geschnappt und verkabelt.
| LCD mit I2C | LCD mit SR_3W |
  |
  |
Fazit:
I2C ist schön weil es schnell angeschlossen ist. Aber für schnelle Zeichenwechsel auf einem LCD ist es leider nicht zu gebrauchen.
Ich werde dann jetzt mal mein Cockpit wieder zerlegen und wacker ein bischen umlöten.
Neue Software – RCC – real cockpit connector
Nachdem hier länger nicht mehr passiert ist, möchte ich meine neue Software vorstellen.
Sie trägt derzeit den Namen „RCC“ – real cockpit connector (Name kann sich noch ändern) und ist mittlerweile im Betastatus funktionstüchtig.
Warum eine eigene Software ?
Ich hatte einfach keine Lust mehr meinen Arduinosketch für die unterschiedlichen Schnittstellen der Softwareanbieter anzupassen.
Welche Funktion hat „RCC“ ?
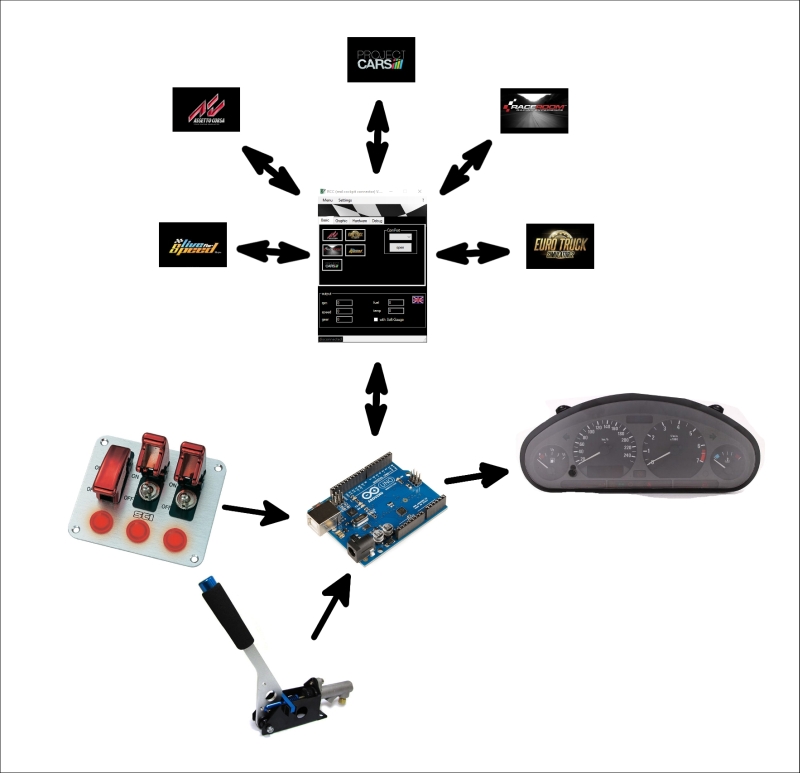
RCC bildet die Konfigurierbare Schnittstelle zwischen dem Arduino und dem Spiel ohne den Sketch wechseln zu müssen.
Wo kommt „RCC“ zum Einsatz ?
Überall da wo du externe Harrdware (Tacho, Handbremse, Blinker, Hupe etc.) an deinem PC anschließen willst um das Game noch realitätsnäher zu machen.
Welche Spiele werden unterstützt ?
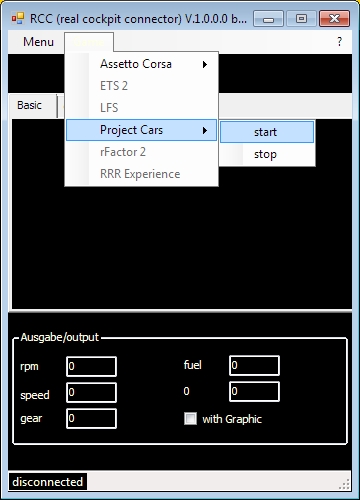
Unterstützt: Assetto Corsa, Project Cars.
Geplant: LFS, rFactor2, RRR Experience, Euro Truck Sim 2
Was wird benötigt?
Ein Arduino Mega, UNO, Nano (clone) und 1 Computer mit dem entsprechendem Spiel unter Windows 7,8 oder 10
Welche Komponenten kann ich steuern ?
Getestet sind Tacho vom BMW e36, Golf3. (OBD2 in Planung)
Led’s, Segmentanzeigen als Visualisierung sowie Potis und Schalter als Eingänge.
Welche Simmulationswerte können verarbeitet werden ?
Alle gängigen Werte die aus den verschieden Spielen ausgelesen werden können, werden nach und nach unterstützt.
Derzeit KMH, RPM, GEAR, FUELL, TEMP als Anzeigewerte, sowie eine analoger und ein digitaler Input.
Inputs verhalten sich als wären sie Joystick und brauchen nur im Spiel hinterlegt werden.
Zum Beispiel könnte man eine originale Handbremse mit einem Poti verbinden und schon wäre sie funktionstüchtig.
Wann ist „RCC“ downloadbar ?
Voraussichtlich Mitte bis Ende Januar 2016
Wird RCC etwas kosten ?
Nein, ich habe viele Anfragen aus aller Welt bezüglich meines Sketches und der Verdrahtung bekommen. Es hat sich gezeigt das es viele Gamer gibt die gerne einen Simulator bauen wollen aber keine Computer/Programmierwissen haben. Mir ging es in anderen Situationen ähnlich und ich war für jede Hilfe dankbar. Es bleibt jedem selbst überlassen ob er mir eine kleine Spende zukommen lassen möchte.
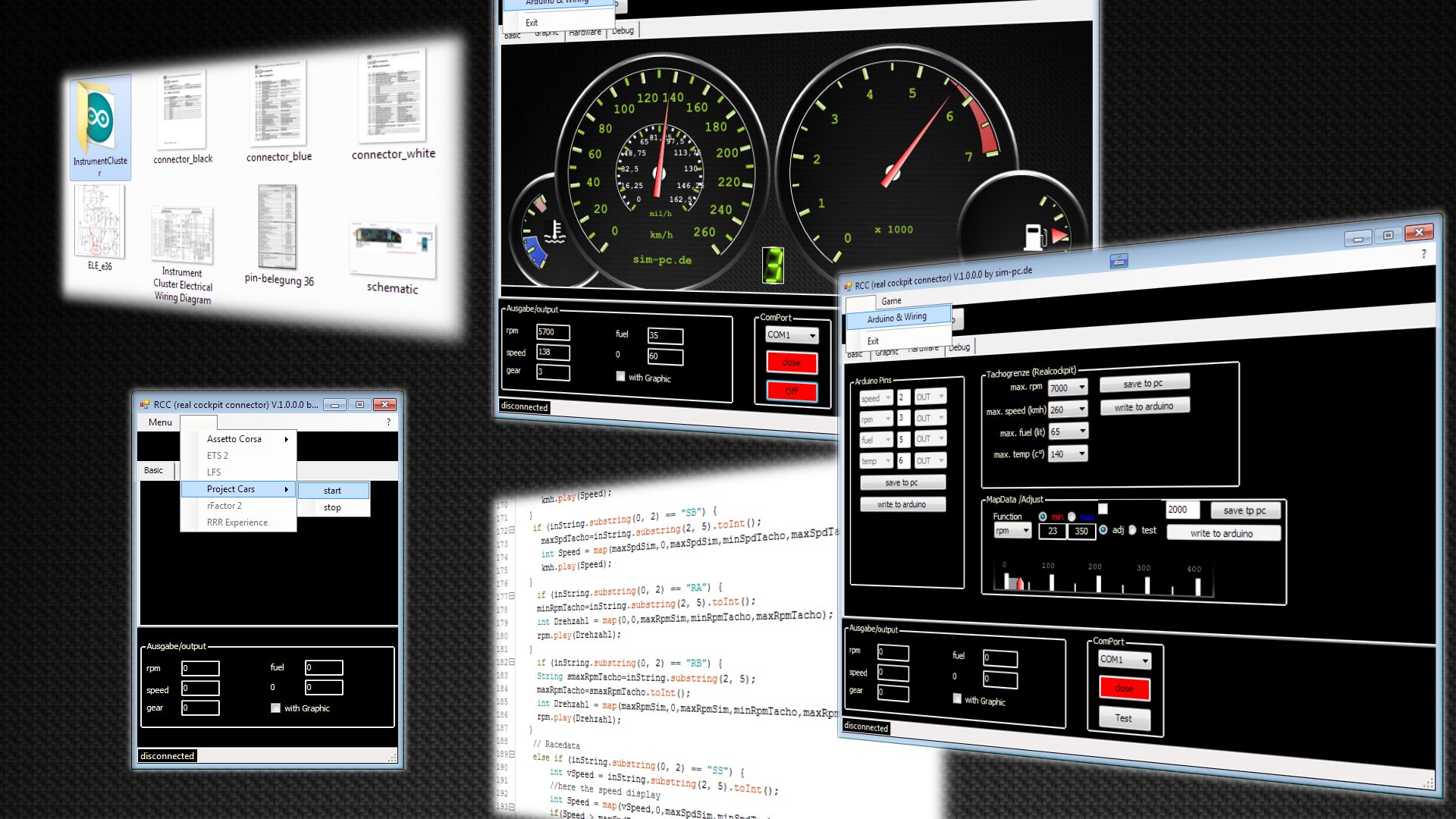
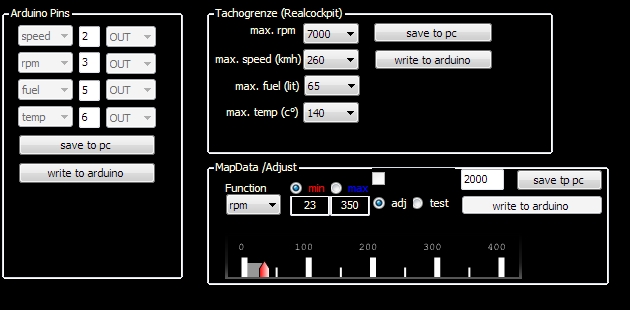
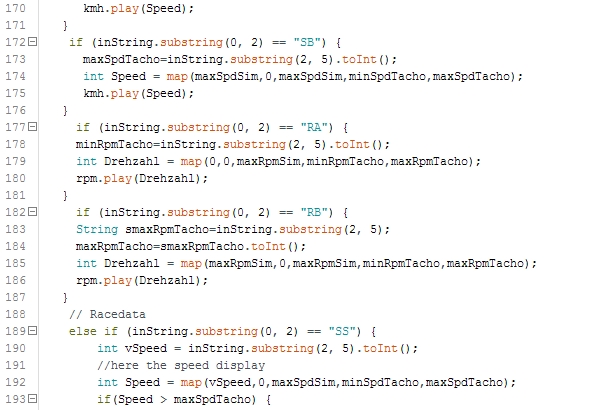
Screenshots RCC v.1.0.0.0 (Beta)

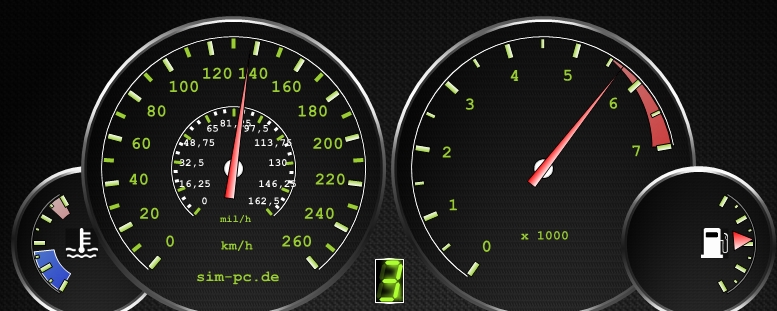
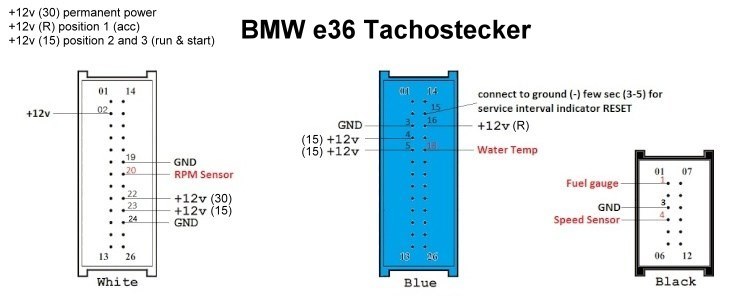
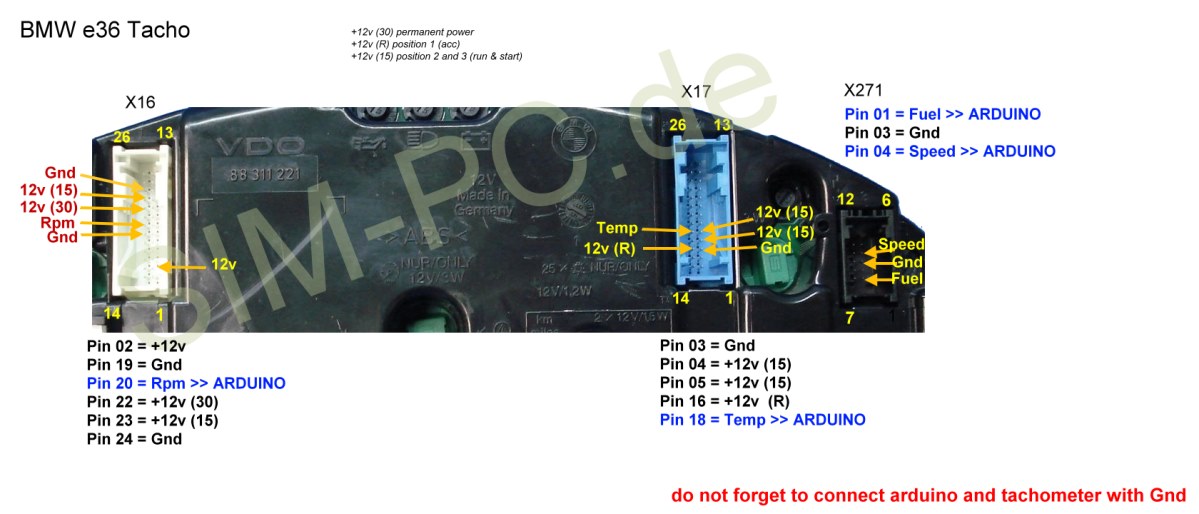
BMW e36 Tacho zu Arduino
Damit das Tacho auch ordnungsemäß funktioniert, muss es wie auf der Zeichnung angeschlossen werden:

BMW Tacho an Arduino – Video1
So, hier mal ein erstes Video von meinem Tacho am Arduino Nano
Platine für Drehzahl und Ganganzeige im BMW e36 Cockpit
Drehzahl und Ganganzeige
8 x 3mm LED mit eingebautem Vorwiderstand,
1 x 7 Segment, 9mm Common Cathode (FYS-3612),
8 x 150 ohm Widerstände





