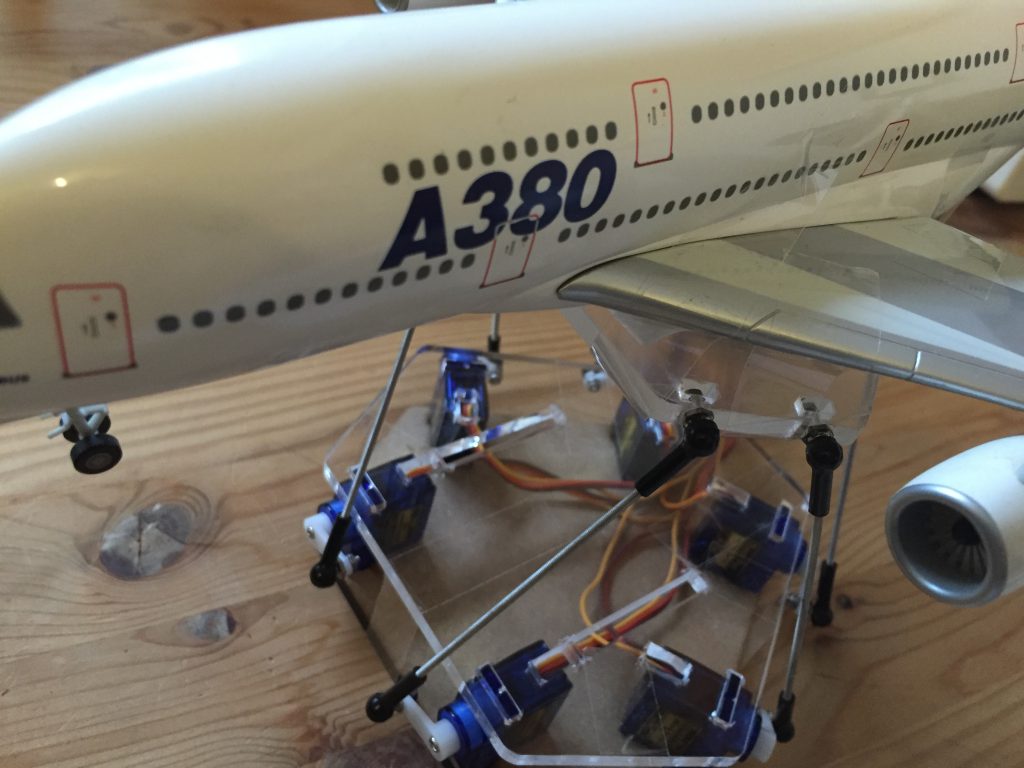
6DOF – Stewart platform mit FSX –
Hier mal ein erster Test einer 6DOF Stewart Plattform auf Servo und arduino-basis in Verbindung mit SIMTOOLS.
/*
//********************************************************************************************
// RC Model Servo
// Original code By EAOROBBIE (Robert Lindsay)
// Completely mangled by aarondc
// For free use for Sim Tool Motion Software
// Changed by SIM-PC.de for 6DOF
//********************************************************************************************
#include
//#define DEBUG 1 // comment out this line to remove debuggin Serial.print lines
const int kActuatorCount = 6; // how many Actuators we are handling
// the letters ("names") sent from Sim Tools to identify each actuator
// NB: the order of the letters here determines the order of the remaining constants kPins and kActuatorScale
const char kActuatorName[kActuatorCount] = { 'A', 'B', 'C', 'D', 'E', 'F' };
const int kPins[kActuatorCount] = {2, 3, 4, 5, 6, 7};
const int kActuatorScale[kActuatorCount][6] = { { 0, 179 } , // 1 Actuator scaling
{ 0, 179 } , // 2 Actuator scaling
{ 0, 179 } , // 3 Actuator scaling
{ 0, 179 } , // 4 Actuator scaling
{ 0, 179 } , // 5 Actuator scaling
{ 0, 179 } // 6 Actuator scaling
};
const char kEOL = '~'; // End of Line - the delimiter for our acutator values
const int kMaxCharCount = 3; // some insurance...
Servo actuatorSet[kActuatorCount]; // our array of Actuators
int actuatorPosition[kActuatorCount] = {90,90,90,98,90,90}; // current Actuator positions, initialised to 90
int currentActuator; // keep track of the current Actuator being read in from serial port
int valueCharCount = 0; // how many value characters have we read (must be less than kMaxCharCount!!
// set up some states for our state machine
// psReadActuator = next character from serial port tells us the Actuator
// psReadValue = next 3 characters from serial port tells us the value
enum TPortState { psReadActuator, psReadValue };
TPortState currentState = psReadActuator;
void setup()
{
// attach the Actuators to the pins
for (int i = 0; i < kActuatorCount; i++)
actuatorSet[i].attach(kPins[i]);
// initialise actuator position
for (int i = 0; i < kActuatorCount; i++) updateActuator(i); Serial.begin(38400); // opens serial port at a baud rate of 9600 } void loop() { } // this code only runs when we have serial data available. ie (Serial.available() > 0).
void serialEvent() {
char tmpChar;
int tmpValue;
while (Serial.available()) {
// if we're waiting for a Actuator name, grab it here
if (currentState == psReadActuator) {
tmpChar = Serial.read();
// look for our actuator in the array of actuator names we set up
#ifdef DEBUG
Serial.print("read in ");
Serial.println(tmpChar);
#endif
for (int i = 0; i < kActuatorCount; i++) {
if (tmpChar == kActuatorName[i]) {
#ifdef DEBUG
Serial.print("which is actuator ");
Serial.println(i);
#endif
currentActuator = i; // remember which actuator we found
currentState = psReadValue; // start looking for the Actuator position
actuatorPosition[currentActuator] = 0; // initialise the new position
valueCharCount = 0; // initialise number of value chars read in
break;
}
}
}
// if we're ready to read in the current Actuator's position data
if (currentState == psReadValue) {
while ((valueCharCount < kMaxCharCount) && Serial.available()) {
tmpValue = Serial.read();
if (tmpValue != kEOL) {
tmpValue = tmpValue - 48;
if ((tmpValue < 0) || (tmpValue > 9)) tmpValue = 0;
actuatorPosition[currentActuator] = actuatorPosition[currentActuator] * 10 + tmpValue;
valueCharCount++;
}
else break;
}
// if we've read the value delimiter, update the Actuator and start looking for the next Actuator name
if (tmpValue == kEOL || valueCharCount == kMaxCharCount) {
#ifdef DEBUG
Serial.print("read in ");
Serial.println(actuatorPosition[currentActuator]);
#endif
// scale the new position so the value is between 0 and 179
actuatorPosition[currentActuator] = map(actuatorPosition[currentActuator], 0, 255, kActuatorScale[currentActuator][0], kActuatorScale[currentActuator][1]);
#ifdef DEBUG
Serial.print("scaled to ");
Serial.println(actuatorPosition[currentActuator]);
#endif
updateActuator(currentActuator);
currentState = psReadActuator;
}
}
}
}
// write the current Actuator position to the passed in Actuator
void updateActuator(int thisActuator) {
actuatorSet[thisActuator].write(actuatorPosition[thisActuator]);
}
Andreas
3 Comments so far
amirPosted on 11:45 a.m. - März 5, 2021
//********************************************************************************************
// RC Model Servo
// Original code By EAOROBBIE (Robert Lindsay)
// Completely mangled by aarondc
// For free use for Sim Tool Motion Software
// Changed by SIM-PC.de for 6DOF
//********************************************************************************************
#include
//#define DEBUG 1 // comment out this line to remove debuggin Serial.print lines
const int kActuatorCount = 6; // how many Actuators we are handling
// the letters („names“) sent from Sim Tools to identify each actuator
// NB: the order of the letters here determines the order of the remaining constants kPins and kActuatorScale
const char kActuatorName[kActuatorCount] = { ‚A‘, ‚B‘, ‚C‘, ‚D‘, ‚E‘, ‚F‘ };
const int kPins[kActuatorCount] = {2, 3, 4, 5, 6, 7};
const int kActuatorScale[kActuatorCount][6] = { { 0, 179 } , // 1 Actuator scaling
{ 0, 179 } , // 2 Actuator scaling
{ 0, 179 } , // 3 Actuator scaling
{ 0, 179 } , // 4 Actuator scaling
{ 0, 179 } , // 5 Actuator scaling
{ 0, 179 } // 6 Actuator scaling
};
const char kEOL = ‚~‘; // End of Line – the delimiter for our acutator values
const int kMaxCharCount = 3; // some insurance…
Servo actuatorSet[kActuatorCount]; // our array of Actuators
int actuatorPosition[kActuatorCount] = {90,90,90,98,90,90}; // current Actuator positions, initialised to 90
int currentActuator; // keep track of the current Actuator being read in from serial port
int valueCharCount = 0; // how many value characters have we read (must be less than kMaxCharCount!!
// set up some states for our state machine
// psReadActuator = next character from serial port tells us the Actuator
// psReadValue = next 3 characters from serial port tells us the value
enum TPortState { psReadActuator, psReadValue };
TPortState currentState = psReadActuator;
void setup()
{
// attach the Actuators to the pins
for (int i = 0; i < kActuatorCount; i++)
actuatorSet[i].attach(kPins[i]);
// initialise actuator position
for (int i = 0; i 0).
}
void serialEvent() {
char tmpChar;
int tmpValue;
while (Serial.available()) {
// if we’re waiting for a Actuator name, grab it here
if (currentState == psReadActuator) {
tmpChar = Serial.read();
// look for our actuator in the array of actuator names we set up
#ifdef DEBUG
Serial.print(„read in „);
Serial.println(tmpChar);
#endif
for (int i = 0; i < kActuatorCount; i++) {
if (tmpChar == kActuatorName[i]) {
#ifdef DEBUG
Serial.print("which is actuator ");
Serial.println(i);
#endif
currentActuator = i; // remember which actuator we found
currentState = psReadValue; // start looking for the Actuator position
actuatorPosition[currentActuator] = 0; // initialise the new position
valueCharCount = 0; // initialise number of value chars read in
break;
}
}
}
// if we're ready to read in the current Actuator's position data
if (currentState == psReadValue) {
while ((valueCharCount < kMaxCharCount) && Serial.available()) {
tmpValue = Serial.read();
if (tmpValue != kEOL) {
tmpValue = tmpValue – 48;
if ((tmpValue 9)) tmpValue = 0;
actuatorPosition[currentActuator] = actuatorPosition[currentActuator] * 10 + tmpValue;
valueCharCount++;
}
else break;
}
// if we’ve read the value delimiter, update the Actuator and start looking for the next Actuator name
if (tmpValue == kEOL || valueCharCount == kMaxCharCount) {
#ifdef DEBUG
Serial.print(„read in „);
Serial.println(actuatorPosition[currentActuator]);
#endif
// scale the new position so the value is between 0 and 179
actuatorPosition[currentActuator] = map(actuatorPosition[currentActuator], 0, 255, kActuatorScale[currentActuator][0], kActuatorScale[currentActuator][1]);
#ifdef DEBUG
Serial.print(„scaled to „);
Serial.println(actuatorPosition[currentActuator]);
#endif
updateActuator(currentActuator);
currentState = psReadActuator;
}
}
}
}
// write the current Actuator position to the passed in Actuator
void updateActuator(int thisActuator) {
actuatorSet[thisActuator].write(actuatorPosition[thisActuator]);
}
amirPosted on 11:49 a.m. - März 5, 2021
your sketch has some problems i can solved some one, but it not work on my Arduino IO
AlexPosted on 2:34 p.m. - Juni 22, 2019
Hello, you did a very good job with this project.
Could you please, show me your axis assignments?